Im Zeitalter der intelligenten Logistik und intelligenten automatisierten Lagerhaltung, die Erreichung von vollständig unbemannter Automatisierung ist kein futuristisches Ziel mehr – es geschieht gerade. Doch hinter jeder nahtlosen Operation verbirgt sich eine der größten ingenieurtechnischen Herausforderungen: das präzise und effiziente Andocken mehrerer automatisierter Systeme.
In einem modernen automatisierten Lager, ist die Vielfalt der Ausrüstung enorm – AGVs, Förderbänder, Roboterarme, Hebevorrichtungen, Shuttles und vieles mehr müssen zusammenarbeiten, um Waren effizient zu bewegen. Allerdings folgt jede Maschinenart unterschiedlichen Andockmechanismen, was ein Netzwerk komplexer Wechselbeziehungen schafft, das präzise Steuerung, Synchronisation und Sicherheit erfordert.
Dieser Artikel befasst sich mit der Kernlogik, Herausforderungen und Lösungen bei der Realisierung eines einheitlichen, flexiblen Andocksystems – eines Systems, das es verschiedenen automatisierten Geräten ermöglicht, in einer hocheffizienten Lagerumgebung miteinander zu kommunizieren, zusammenzuarbeiten und nahtlos zu operieren.
🚀 Die Komplexität des automatisierten Andockens in modernen Lagern
In einem multigerätigen Logistiksystem, ist die Zusammenarbeit zwischen Robotern für einen einzigen Materialtransportprozess unerlässlich. Schauen wir uns einige gängige Andockszenarien:
-
A CTU-Roboter überträgt Behälter von und zu einem Förderband
-
Ein AGV liefert oder empfängt Paletten von einem Palettenförderer
-
Ein AGV andockt an ein Hebesystem, um Waren zwischen Etagen zu transportieren
-
A Roboterarm nimmt Kisten von einem Förderband auf und platziert sie auf einer AGV-Palette
-
Mehrere AGVs koordinieren sich an derselben Ladezone
Jedes dieser Szenarien beinhaltet Echtzeitkommunikation, Sicherheitsgarantie und räumliche Präzision. Eine schlechte Synchronisation könnte zu Kollisionen, Staus oder Ausfallzeiten führen, was schwerwiegende betriebliche Folgen nach sich zieht.
⚙️ Was ist eine Andockstation?
A Andockstation ist der physische Punkt, an dem zwei Geräte Waren oder Behälter austauschen. Sie kann auch als Zone der Mensch-Roboter-Interaktion in hybriden Lagern dienen.
Damit eine Andockstation effektiv funktioniert, muss sie zwei zentrale Anforderungen erfüllen:
-
Positionierungspräzision – beide Geräte müssen exakt dieselben physischen Koordinaten erreichen.
-
Prozesssteuerungslogik – eine definierte Abfolge von Vorgängen legt fest, welches Gerät zuerst bewegt wird, wie der Übergang erfolgt und wie die Sicherheit gewährleistet wird.
Doch mit zunehmender Vielfalt der Lagergeräte steigt auch die Komplexität der Andocklogik. Wenn jede Gerätekombination ihr eigenes Protokoll benötigt, wird das System fragmentiert und schwer zu warten.
Dies ist der Ort, an dem flexible Andocklogik kommt ins Spiel – ein universelles Kommunikations- und Steuerungsmodell, das sich an verschiedene Gerätetypen und Konfigurationen anpassen kann.
🧩 Flexible vs. starre Andockung: Ein Fallbeispiel
Betrachten wir ein häufiges Szenario:
Ein AGV (flexibles Gerät) muss eine Palette an ein Förderband (starreres Gerät).
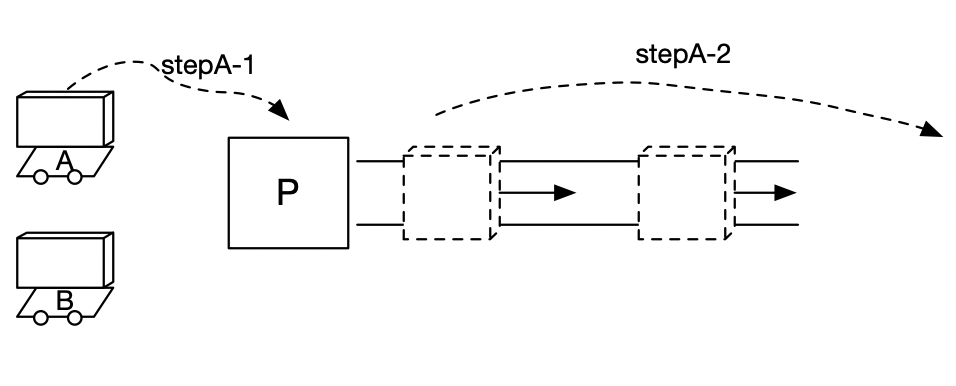
1️⃣ Vor-Andockphase
Bevor der Transfer beginnt, müssen mehrere AGVs möglicherweise Paletten zum selben Punkt liefern. Da sie unterschiedliche Entfernungen zurücklegen und mit unvorhersehbarem Verkehr konfrontiert sind, dynamische Disposition ist erforderlich, um zu entscheiden, welcher AGV zuerst andockt.
Dies ist ein lokalisiertes Schwarmentscheidungsproblem, das sowohl Geschwindigkeit als auch Effizienz ausbalanciert. Leer stehende AGVs müssen sich außerdem strategisch neu positionieren, um Wegblockaden zu vermeiden oder Reisezeit zu verschwenden.
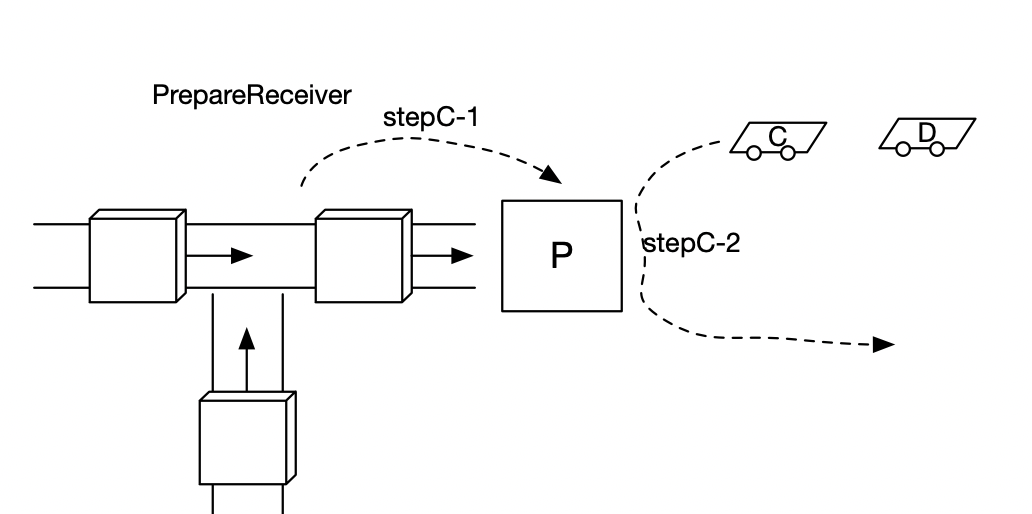
Wenn sich die Situation umkehrt – also das Förderband an den AGV liefert– sollte der AGV in der Nähe des Andockbereichs warten, bereit, sofort zu reagieren, sobald das Förderband signalisiert, dass eine Palette verfügbar ist. Dies reduziert die Latenz und hält den Durchsatz hoch.
🔄 Der Andockprozess: Synchronisation in Bewegung
Während des Andockens müssen beide Systeme die exakte physische Schnittstelle gleichzeitig. In der Regel gibt es zwei Ansätze:
-
Synchrones Bewegungs-Docking: Beide Geräte bewegen sich gemeinsam, wie bei Rollförderern. Hier sollte die Empfangsseite etwas früher starten, um ein Verklemmen zu verhindern.
-
Sequenzielles Docking: Ein Gerät legt die Last ab, und das andere nimmt sie anschließend auf. Dies erfordert präzise Zeitsteuerung und stabile Positionierung.
Sicherheit hat weiterhin oberste Priorität. Fehlausrichtung oder schlechte Koordination können dazu führen, mechanische Schäden oder Unterbrechungen im Arbeitsablauf.
✅ Nach dem Docking: Den Weg für Effizienz ebnen
Sobald das Docking abgeschlossen ist, muss das AGV schnell abfahren um den Platz für die nächste Einheit freizumachen. Verzögerungen am Dockingpunkt können zu Staus führen und die Gesamteffizienz des Systems verringern.
Daher sind Routenplanung und Abfahrtslogik ein integraler Bestandteil des gesamten Docking-Designs. AGVs können so programmiert werden, dass sie entweder zu nahegelegenen Ruhepositionen fahren oder sofort mit ihrer nächsten Aufgabe beginnen, je nach Arbeitslast und Priorisierung im Zeitplan.
⚡ Strategien zur Effizienzoptimierung
Um bei groß angelegten Operationen einen hohen Durchsatz aufrechtzuerhalten, muss ein intelligentes Lager über mechanische Koordination hinausgehen – es braucht intelligente Planung und vorausschauende Steuerung. Zu den wichtigsten Strategien gehören:
1. Hochprioritäre Disposition
Wenn AGVs mit Förderbändern oder Hebebühnen interagieren, sorgt die Zuweisung von AGVs mit hoher Priorität zur schnellen Entnahme von Paletten dafür, dass Engpässe vermieden und ein kontinuierlicher Materialfluss gewährleistet wird.
2. Proaktive Leistungszuteilung
Bereiten Sie AGVs im Voraus in der Nähe stark frequentierter Dockingpunkte vor, um die Fahrstrecke zu minimieren. Vorhersagealgorithmen bestimmen den optimalen Zeitpunkt für die Vorpositionierung – zu früh verschwendet Kapazität, zu spät verursacht Verzögerungen.
3. Rechtzeitiges Abfahren nach der Lieferung
Sobald eine Palette geliefert wurde, sollte das AGV in eine Bereitschaftszone zurückkehren oder sofort eine neue Aufgabe übernehmen. So bleibt die Flotte dynamisch und vermeidet Leerlaufblockaden an kritischen Kreuzungen.
4. Auswahl des Dockingpunkts
Wenn mehrere Dockingoptionen vorhanden sind (zum Beispiel mehrere Hebebühnen für den Transport zwischen Etagen), verwendet ein adaptiver Docking-Auswahlalgorithmus die Station mit der geringsten aktuellen Arbeitslast.
🗺️ Layout- und Kartenoptimierung
Effective Lagerkarten-Design ist entscheidend für reibungslose Docking-Operationen. Ein gut durchdachtes Layout unterstützt koordinierte Bewegungen, vermeidet Staus und erhöht die Gesamtstabilität des Systems.
Zu den wichtigsten Layout-Designelementen gehören:
• Warteschlangenzonen
Vor-Docking-Warteschlangenzonen helfen AGVs, sich in der richtigen Reihenfolge einzufügen, sorgen für geordneten Zugang zu stark frequentierten Dockingstationen und verhindern Chaos in Spitzenzeiten.
• Getrennte Wartebereiche
Wenn eine Station nur einen Ein- und Ausgang hat, Puffer-Wartebereiche sind entscheidend, um Staus zu vermeiden und einen kontinuierlichen Fluss zu unterstützen.
• Ruhezonen
Ruheplätze in der Nähe von Dockingbereichen ermöglichen es AGVs, bereit zu bleiben, die Reaktionszeit zu minimieren und die Reaktionsfähigkeit der Flotte zu verbessern, wenn neue Aufgaben zugewiesen werden.
Diese Layoutprinzipien sind Teil von Akuros intelligentem Lagerplanungssystem, wo universelle Dockinglogik hand in hand arbeitet mit Kartenoptimierung um maximale Effizienz und Flexibilität zu erreichen.
🤖 Warum flexibles Docking für die Zukunft wichtig ist
Mit fortschreitender Automatisierungstechnologie starre, zweiseitige Verbindungen machen Platz für modulare, flexible Systeme die eine breite Palette von Gütern und Arbeitsabläufen bewältigen können. Flexibles Docking ermöglicht:
-
Nahtlose Koordination zwischen mehreren Automatisierungssystemen
-
Schnellere Anpassung an Änderungen im Layout oder bei Produkten
-
Reduzierte Systemausfallzeiten
-
Höhere Sicherheit und Betriebszuverlässigkeit
Mit Akuros automatisierte Lagerlösungen, Unternehmen können ein neues Niveau an Lagerintelligenz erreichen – wo jedes AGV, jede Hebebühne und jedes Förderband über ein einheitliches Logiksystem kommuniziert und so eine wirklich flexible, effiziente und sichere automatisierte Umgebung schafft.
💬 Schlussfolgerung
Aufbau eines unbemanntes automatisiertes Lager geht es nicht nur um Roboter – es geht darum, diesen Robotern eine intelligente Zusammenarbeit zu ermöglichen. Durch flexible Andocklogik, prädiktive Planung und Layout-Optimierung können Logistikprozesse Echtzeit-Effizienz, Sicherheit und Skalierbarkeit erreichen.
Unter Akuros, treiben wir die Grenzen der Lagerautomatisierung weiter voran – und liefern Lösungen, die neu definieren, wie Geräte in der Ära der intelligenten Logistik miteinander verbunden sind, kommunizieren und zusammenarbeiten.