À l’ère de la logistique intelligente et l’entreposage automatisé intelligent, atteindre une automatisation entièrement sans personnel n’est plus un objectif futuriste — cela se produit déjà. Pourtant, derrière chaque opération fluide se cache l’un des plus grands défis d’ingénierie : l’amarrage précis et efficace de multiples systèmes automatisés.
Dans un entrepôt automatisé moderne, la diversité des équipements est immense — AGV, lignes de convoyage, bras robotiques, élévateurs, navettes, et bien d’autres doivent travailler ensemble pour déplacer les marchandises de manière efficace. Cependant, chaque type de machine suit des mécanismes d’amarrage différents, créant un réseau complexe d’interconnexions qui exige un contrôle précis, une synchronisation et une sécurité rigoureux.
Cet article explore les logique centrale, défis et solutions pour parvenir à un système d’amarrage unifié et flexible — un système qui permette à différents dispositifs automatisés de communiquer, de coopérer et de fonctionner de manière fluide dans un environnement d’entrepôt à haute efficacité.
🚀 La complexité de l’amarrage automatisé dans les entrepôts modernes
Dans un système logistique multi-appareils, la collaboration entre robots est essentielle pour un seul processus de manutention des matériaux. Examinons quelques scénarios courants d’ amarrage:
-
A robot CTU transfère des bacs vers et depuis une ligne de convoyage
-
Un AGV livre ou reçoit des palettes d’une chaîne de palettisation
-
Un AGV s’amarre à un système d’élévation pour transférer des marchandises entre les étages
-
A bras robotique prend des boîtes sur un convoyeur et les place sur une palette d’AGV
-
Plusieurs AGV se coordonnent dans la même zone de chargement
Chacun de ces scénarios implique une communication en temps réel, une assurance de la sécurité et une précision spatiale. Une mauvaise synchronisation pourrait entraîner des collisions, des blocages ou des arrêts de production, avec de graves conséquences opérationnelles.
⚙️ Qu’est-ce qu’une station d’amarrage ?
A station d’amarrage est le point physique où deux appareils échangent des marchandises ou des conteneurs. Elle peut également servir de zone d’interaction homme-robot dans les entrepôts hybrides.
Pour qu’une station d’amarrage fonctionne efficacement, elle doit satisfaire deux exigences clés :
-
Précision du positionnement — les deux appareils doivent atteindre exactement les mêmes coordonnées physiques.
-
Logique de contrôle du processus — une séquence définie d’opérations détermine quel appareil se déplace en premier, comment se fait le passage de témoin et comment la sécurité est maintenue.
Cependant, à mesure que la diversité des équipements d’entrepôt augmente, augmente aussi la complexité de la logique d’amarrage. Si chaque combinaison d’appareils nécessite son propre protocole, le système devient fragmenté et difficile à entretenir.
C'est ici que logique d’amarrage flexible entre en jeu — un modèle universel de communication et de contrôle qui peut s’adapter à divers types d’équipements et à différentes configurations.
🧩 Amarrage flexible vs. rigide : une étude de cas
Considérons un scénario courant :
Un AGV (appareil flexible) doit transférer une palette vers une ligne de convoyage (appareil rigide).
1️⃣ Phase pré-amarrage
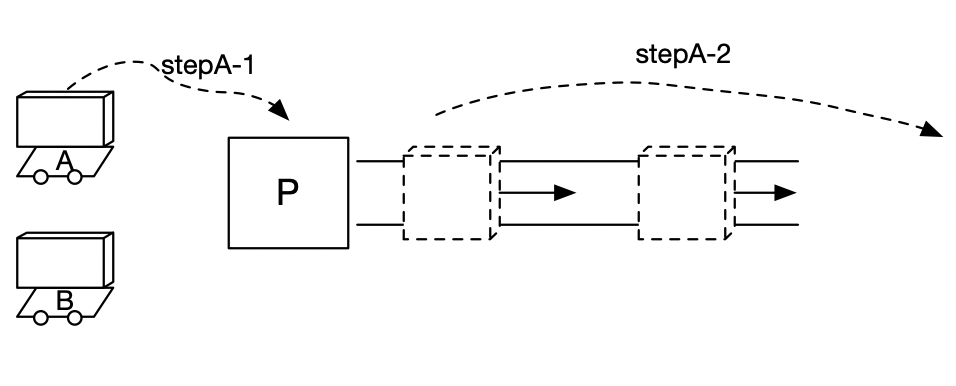
Avant le début du transfert, plusieurs AGV peuvent avoir besoin de livrer des palettes au même endroit. Puisqu’ils parcourent des distances différentes et sont confrontés à un trafic imprévisible, planification dynamique est nécessaire pour décider quel AGV s’amarrera en premier.
Il s’agit d’un problème localisé de prise de décision en essaim, qui équilibre à la fois la rapidité et l’efficacité. Les AGV inactifs doivent également se repositionner stratégiquement pour éviter de bloquer les voies ou de gaspiller du temps de trajet.
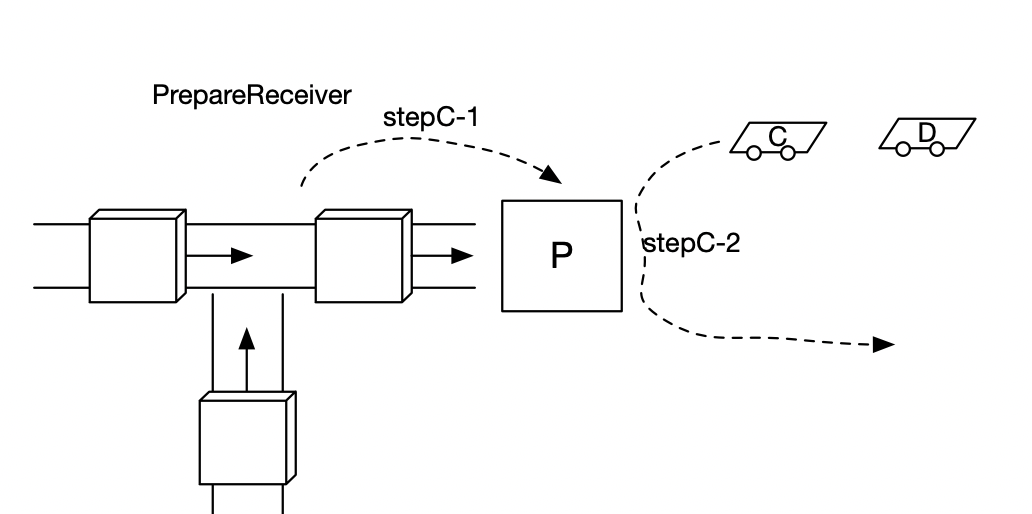
Lorsque la situation est inversée — c’est-à-dire que la ligne de convoyage livre à l’AGV— l’AGV devrait attendre près de la zone d’amarrage, prêt à réagir dès que le convoyeur signale qu’une palette est disponible. Cela réduit la latence et maintient un débit élevé.
🔄 Le processus d’amarrage : la synchronisation en mouvement
Pendant l’amarrage, les deux systèmes doivent atteindre la interface physique exacte simultanément. Il existe généralement deux approches :
-
Docking à mouvement synchrone: les deux dispositifs se déplacent ensemble, comme sur des convoyeurs roulants. Ici, le côté récepteur doit démarrer légèrement plus tôt pour éviter les blocages.
-
Docking séquentiel: un dispositif dépose la charge, et l’autre la récupère ensuite. Cela exige une synchronisation précise et un positionnement stable.
La sécurité demeure la priorité absolue. Un désalignement ou une mauvaise coordination peut entraîner des dommages mécaniques ou des interruptions du flux de travail.
✅ Post-Docking : libérer la voie pour l’efficacité
Une fois le docking terminé, l’AGV doit partir rapidement pour libérer l’espace en vue de la prochaine unité. Des retards au point de docking peuvent entraîner des embouteillages, réduisant l’efficacité globale du système.
Par conséquent, la planification de l’itinéraire et la logique de départ sont essentielles à la conception globale du docking. Les AGV peuvent être programmés pour se rendre dans des zones de repos voisines ou pour commencer immédiatement leur prochaine tâche, selon la charge de travail et les priorités de planification.
⚡ Stratégies d’optimisation de l’efficacité
Pour maintenir un débit élevé dans les opérations à grande échelle, un entrepôt intelligent doit aller au-delà de la coordination mécanique — il a besoin de une planification intelligente et un contrôle prédictif. Les stratégies clés comprennent :
1. Expédition à haute priorité
Lorsque les AGV interagissent avec des convoyeurs ou des ascenseurs, affecter les AGV à haute priorité pour retirer rapidement les palettes permet d’éviter les goulots d’étranglement et d’assurer un flux continu de matériaux.
2. Allocation proactive de la puissance
Préparer à l’avance les AGV près des points de docking très fréquentés afin de minimiser la distance de déplacement. Des algorithmes prédictifs déterminent le meilleur moment pour le pré-positionnement — trop tôt gaspille la capacité, trop tard cause des retards.
3. Départ en temps voulu après la livraison
Une fois qu’une palette est livrée, l’AGV devrait retourner dans une zone de veille ou prendre immédiatement une nouvelle tâche. Cela maintient la flotte dynamique et évite les blocages inutiles aux intersections critiques.
4. Sélection du point de docking
Si plusieurs options de docking existent (par exemple, plusieurs ascenseurs pour le transport inter-étages), un algorithme adaptatif de sélection du docking donne la priorité à la station ayant la charge de travail la plus faible à ce moment-là.
🗺️ Optimisation de la disposition et de la carte
Effectif la conception de la carte de l’entrepôt est essentielle pour des opérations de docking fluides. Une disposition bien planifiée favorise les mouvements coordonnés, évite les congestions et renforce la stabilité globale du système.
Les principaux éléments de conception de la disposition incluent :
• Zones de file d’attente
Les zones de file d’attente avant le docking aident les AGV à s’aligner dans l’ordre, assurant un accès ordonné aux stations de docking très fréquentées et prévenant le chaos pendant les périodes de pointe.
• Zones d’attente séparées
Lorsqu’une station n’a qu’une seule entrée et une seule sortie, les zones tampon d’attente sont cruciales pour prévenir les embouteillages et soutenir un flux continu.
• Zones de repos
Les espaces de repos près des zones de docking permettent aux AGV de rester en attente, minimisant le temps de réaction et améliorant la réactivité de la flotte lorsque de nouvelles tâches sont assignées.
Ces principes de disposition font partie de le système intelligent de planification d’entrepôt d’Akuros, où la logique universelle de docking fonctionne main dans la main avec l’optimisation de la carte pour offrir une efficacité et une flexibilité maximales.
🤖 Pourquoi le docking flexible compte pour l’avenir
À mesure que les technologies d’automatisation progressent, les connexions rigides et monofonctionnelles cèdent la place à des systèmes modulaires et flexibles qui peuvent gérer une large gamme de marchandises et de flux de travail. Le docking flexible permet :
-
Une coordination fluide entre plusieurs systèmes d’automatisation
-
Une adaptation plus rapide aux changements de disposition ou de produits
-
Une réduction des temps d’arrêt du système
-
Une sécurité et une fiabilité opérationnelle accrues
With Les solutions d’entrepôt automatisé d’Akuros, les entreprises peuvent atteindre un nouveau niveau d’intelligence d’entrepôt — où chaque AGV, ascenseur et convoyeur communique via un système logique unifié, créant ainsi un environnement automatisé véritablement flexible, efficace et sûr.
💬 Conclusion
Construire un entrepôt automatisé sans personnel ne concerne pas seulement les robots — il s’agit de permettre à ces robots de collaborer de manière intelligente. Grâce à logique d’amarrage flexible, à la planification prédictive et à l’optimisation de la disposition, les opérations logistiques peuvent atteindre une efficacité, une sécurité et une évolutivité en temps réel.
Au Akuros, nous continuons à repousser les limites de l’automatisation des entrepôts — en proposant des solutions qui redéfinissent la manière dont les équipements se connectent, communiquent et coopèrent à l’ère de la logistique intelligente.