In het tijdperk van intelligente logistiek en slimme geautomatiseerde magazijnen, het bereiken van volledig onbemande automatisering is niet langer een futuristisch doel—het gebeurt nu. Toch schuilt achter elke naadloze operatie een van de grootste technische uitdagingen: het precieze en efficiënte koppelen van meerdere geautomatiseerde systemen.
In een modern geautomatiseerd magazijn, is de diversiteit aan apparatuur enorm—AGV’s, transportbanden, robotarmen, liften, shuttles en meer moeten samenwerken om goederen efficiënt te verplaatsen. Echter volgt elk type machine verschillende koppelingsmechanismen, waardoor er een web van complexe onderlinge verbindingen ontstaat dat nauwkeurige controle, synchronisatie en veiligheid vereist.
Dit artikel onderzoekt de kernlogica, uitdagingen en oplossingen bij het realiseren van een uniform, flexibel koppelingssysteem—een systeem dat verschillende geautomatiseerde apparaten in staat stelt om te communiceren, samen te werken en naadloos te functioneren in een hoogefficiënte magazijnomgeving.
🚀 De complexiteit van geautomatiseerde koppeling in moderne magazijnen
In een multi-apparaat logistiek systeem, is samenwerking tussen robots essentieel voor één materiaalhandlingsproces. Laten we eens kijken naar enkele veelvoorkomende koppelingsscenario’s:
-
A CTU-robot verplaatst bakken van en naar een transportband
-
Een AGV levert of ontvangt pallets van een pallettransportband
-
Een AGV koppelt met een liftsysteem om goederen tussen verdiepingen te verplaatsen
-
A robotarm pakt dozen van een transportband en plaatst ze op een AGV-pallet
-
Meerdere AGV’s coördineren zich op dezelfde laadzone
Elk van deze scenario’s houdt realtime communicatie, veiligheidsborging en ruimtelijke precisie in. Slechte synchronisatie kan leiden tot botsingen, opstoppingen of stilstand, wat ernstige operationele gevolgen heeft.
⚙️ Wat is een dockingstation?
A dockingstation is het fysieke punt waar twee apparaten goederen of containers uitwisselen. Het kan ook dienen als een zone voor mens-robotinteractie in hybride magazijnen.
Om effectief te functioneren moet een dockingstation aan twee belangrijke eisen voldoen:
-
Positioneringsprecisie – beide apparaten moeten exact dezelfde fysieke coördinaten bereiken.
-
Procescontrolelogica – een gedefinieerde reeks handelingen bepaalt welk apparaat eerst beweegt, hoe de overdracht plaatsvindt en hoe de veiligheid wordt gewaarborgd.
Echter, naarmate de diversiteit van magazijnapparatuur toeneemt, neemt ook de complexiteit van de koppelingslogica. Als elke apparaatcombinatie zijn eigen protocol vereist, wordt het systeem gefragmenteerd en moeilijk te onderhouden.
Dit is waar flexibele koppelingslogica komt hier in beeld—een universeel communicatie- en besturingsmodel dat zich kan aanpassen aan verschillende apparatuurtypen en configuraties.
🧩 Flexibel versus rigide koppeling: een casestudy
Neem een veelvoorkomend scenario:
Een AGV (flexibel apparaat) moet een pallet overbrengen naar een transportband (rigide apparaat).
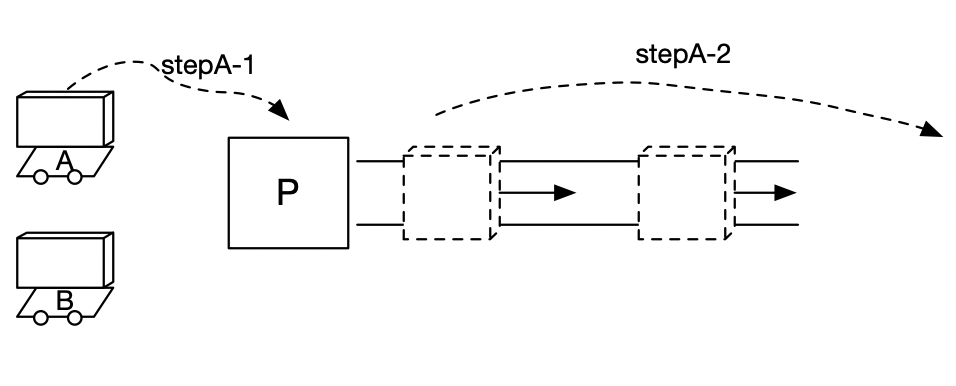
1️⃣ Pre-dockingfase
Voordat de overdracht begint, moeten meerdere AGV’s mogelijk pallets naar hetzelfde punt brengen. Omdat ze verschillende afstanden afleggen en onvoorspelbaar verkeer tegenkomen, dynamische planning is nodig om te bepalen welke AGV als eerste dockt.
Dit is een gelokaliseerd zwermbeslissingsprobleem, waarbij zowel snelheid als efficiëntie worden gebalanceerd. Niet-actieve AGV’s moeten zich ook strategisch herpositioneren om paden te voorkomen of reistijd te verspillen.
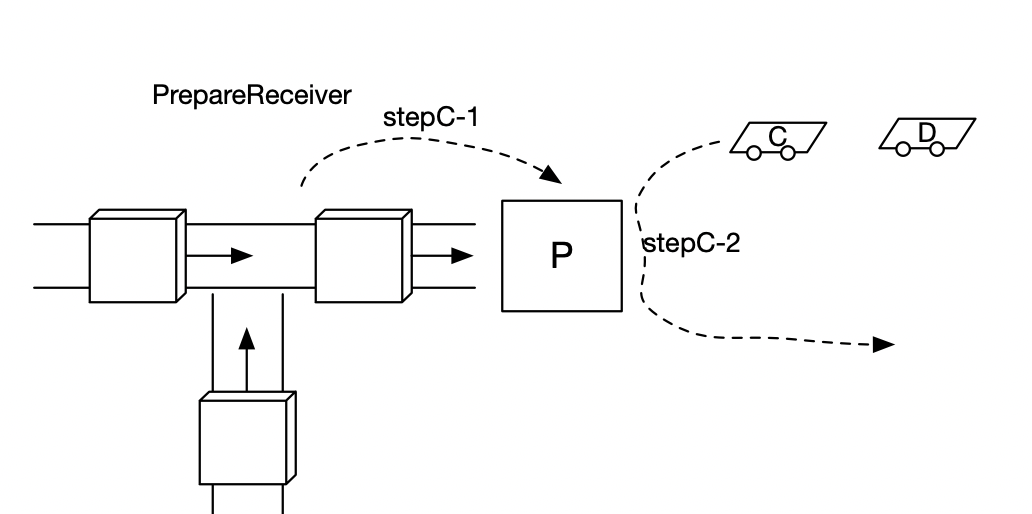
Wanneer de situatie omgekeerd is—dat wil zeggen, de transportband levert aan de AGV—moet de AGV wachten nabij het dockinggebied, klaar om te reageren zodra de transportband aangeeft dat er een pallet beschikbaar is. Dit vermindert de latentie en houdt de doorvoersnelheid hoog.
🔄 Het dockingproces: synchronisatie in beweging
Tijdens het docking moeten beide systemen het exacte fysieke interface tegelijk bereiken. Er zijn meestal twee benaderingen:
-
Synchronische bewegingskoppeling: beide apparaten bewegen samen, zoals bij rollende transportbanden. Hier moet de ontvangende kant iets eerder starten om vastlopen te voorkomen.
-
Sequentiële koppeling: één apparaat zet de lading neer, en het andere pakt deze daarna op. Dit vereist nauwkeurige timing en stabiele positionering.
Veiligheid blijft de hoogste prioriteit. Misalignement of slechte coördinatie kan leiden tot mechanische schade of onderbrekingen in de workflow.
✅ Na-koppeling: De weg vrijmaken voor efficiëntie
Zodra de koppeling voltooid is, moet de AGV snel vertrekken om de ruimte vrij te maken voor de volgende eenheid. Vertragingen bij het koppelingspunt kunnen leiden tot verkeersopstoppingen, waardoor de algehele efficiëntie van het systeem afneemt.
Daarom, routeplanning en vertreklogica zijn integraal voor het gehele koppelingsontwerp. AGVs kunnen worden geprogrammeerd om naar nabijgelegen rustposities te gaan of direct aan hun volgende taak te beginnen, afhankelijk van de werkbelasting en planningprioriteiten.
⚡ Strategieën voor efficiëntie-optimalisatie
Om een hoge doorvoersnelheid te behouden bij grootschalige operaties, moet een slim magazijn verder gaan dan mechanische coördinatie—het heeft intelligente planning en voorspellende controle. Belangrijke strategieën zijn:
1. Uitsturen met hoge prioriteit
Wanneer AGVs interactie hebben met transportbanden of liften, helpt het toewijzen van AGVs met hoge prioriteit om pallets snel te verwijderen om knelpunten te voorkomen en een continue materiaalstroom te garanderen.
2. Proactieve vermogensallocatie
Bereid AGVs van tevoren voor in de buurt van drukke koppelingspunten om de reisafstand te minimaliseren. Voorspellende algoritmen bepalen het beste moment voor het voorpositioneren—te vroeg verspilt capaciteit, te laat veroorzaakt vertragingen.
3. Tijdig vertrek na levering
Zodra een pallet is geleverd, zou de AGV terugkeren naar een standby-zone of meteen een nieuwe taak oppakken. Dit houdt de vloot dynamisch en voorkomt ongebruikte blokkades bij kritieke kruispunten.
4. Selectie van het koppelingspunt
Als er meerdere koppelingsmogelijkheden bestaan (bijvoorbeeld meerdere liften voor inter-vloer transport), dan zal een adaptieve koppelingsselectie-algoritme de station met de laagste huidige werklast prioriteren.
🗺️ Layout- en kaartoptimalisatie
Effective ontwerp van de magazijnkaart is essentieel voor soepele koppelingsoperaties. Een goed geplande lay-out ondersteunt gecoördineerde beweging, voorkomt congestie en verbetert de algehele systeemstabiliteit.
Belangrijke elementen van het lay-outontwerp zijn:
• Wachtrijzones
Pre-koppelingswachtrijzones helpen AGVs in volgorde te staan, waardoor de ordelijke toegang tot drukke koppelingsstations wordt gehandhaafd en chaos tijdens piekperiodes wordt voorkomen.
• Gescheiden wachtruimtes
Wanneer een station één ingang en één uitgang heeft, buffer-wachtruimtes zijn cruciaal om verkeersopstoppingen te voorkomen en een continue stroom te ondersteunen.
• Rustzones
Rustplekken in de buurt van koppelingsgebieden stellen AGVs in staat om standby te blijven, waardoor de reactietijd wordt geminimaliseerd en de responsiviteit van de vloot wordt verbeterd wanneer nieuwe taken worden toegewezen.
Deze lay-outprincipes maken deel uit van Akuros’ intelligente magazijnplanningsysteem, waar universele koppelingslogica hand in hand werkt met kaartoptimalisatie om maximale efficiëntie en flexibiliteit te bieden.
🤖 Waarom flexibele koppeling belangrijk is voor de toekomst
Naarmate automatiseringstechnologieën zich ontwikkelen, starre, monofunctionele verbindingen maken plaats voor modulaire, flexibele systemen die een breed scala aan goederen en workflows aankunnen. Flexibele koppeling maakt mogelijk:
-
Naadloze coördinatie tussen meerdere automatiseringssystemen
-
Sneller aanpassen aan veranderingen in de lay-out of product
-
Minder systeemdowntime
-
Hogere veiligheid en operationele betrouwbaarheid
Met Akuros’ geautomatiseerde magazijnoplossingen, kunnen ondernemingen een nieuw niveau van magazijnintelligentie bereiken—waar elke AGV, lift en transportband communiceert via een uniform logisch systeem, waardoor een echt flexibel, efficiënt en veilig geautomatiseerd milieu ontstaat.
💬 Conclusie
Het bouwen van een onbemand geautomatiseerd magazijn gaat niet alleen over robots—het gaat erom die robots in staat te stellen op intelligente wijze samen te werken. Door flexibele koppelingslogica, voorspellende planning en layoutoptimalisatie kunnen logistieke operaties real-time efficiëntie, veiligheid en schaalbaarheid bereiken.
Op Akuros, blijven we de grenzen van magazijnautomatisering verleggen—door oplossingen te leveren die opnieuw definiëren hoe apparatuur zich verbindt, communiceert en samenwerkt in het tijdperk van slimme logistiek.