~の時代に インテリジェント物流 そして スマート自動倉庫、実現する 完全無人化の自動化 はもはや未来の目標ではなく、今まさに起こっていることです。しかし、あらゆるシームレスな運用の背後には、最大級のエンジニアリング課題が存在します: 複数の自動化システムの正確で効率的なドッキング.
現代の 自動倉庫では、設備の多様性が非常に大きく——AGV、コンベヤーライン、ロボットアーム、リフト、シャトルなど、さまざまな機器が連携して効率的に貨物を移動させなければなりません。しかし、各タイプの機械は異なるドッキングメカニズムに従っており、その結果、複雑な相互接続のネットワークが形成され、精密な制御、同期、そして安全性が求められます。
本記事では コアロジック、課題、および解決策 統一的で柔軟なドッキングシステムを実現すること——異なる自動化デバイスが高効率な倉庫環境でシームレスに通信し、協力し、稼働できるようにするためのシステムです。
🚀 現代倉庫における自動ドッキングの複雑さ
において マルチデバイスの物流システムでは、単一の資材搬送プロセスにおいてロボット同士の連携が不可欠です。いくつかの一般的な ドッキングシナリオ:
-
A CTUロボット コンベヤーラインへの荷箱の移送・受取
-
An AGV パレットコンベヤーからのパレットの配送または受領
-
An AGV フロア間の貨物移送のためにリフトシステムとドッキング
-
A ロボットアーム コンベヤーから箱をピックアップし、AGVのパレット上に載せる
-
複数のAGVが同一の積載ゾーンで調整を行う
これらのシナリオのいずれも、リアルタイムの通信、安全確保、そして空間的な精度が求められます。同期が不十分だと、 衝突、詰まり、またはダウンタイムが発生する可能性があります、深刻な運用上の影響を招くことになります。
⚙️ ドッキングステーションとは何か?
A ドッキングステーション は、二つのデバイスが貨物やコンテナを交換する物理的なポイントです。また、 人間とロボットのインタラクションゾーン ハイブリッド倉庫においても機能します。
ドッキングステーションが効果的に機能するためには、二つの重要な要件を満たす必要があります:
-
位置決めの精度 ——両方のデバイスが同じ物理座標に正確に到達しなければなりません。
-
プロセス制御ロジック ——定められた一連の操作によって、どのデバイスが先に動き、どのように引き渡しが行われ、どのように安全性が保たれるかが決まります。
しかし、倉庫内のデバイスの多様性が増すにつれ、 ドッキングロジックの複雑さも増加します。もしすべてのデバイスの組み合わせに独自のプロトコルが必要だとしたら、システムは断片化され、保守が困難になります。
そこで 柔軟なドッキングロジック が登場します——さまざまな機器の種類や構成に適応できる、普遍的な通信および制御モデルです。
🧩 柔軟なドッキングと硬直したドッキング:ケーススタディ
一般的なシナリオを考えてみましょう:
An AGV (柔軟なデバイス)がパレットを コンベヤーラインへ移送しなければならない場合 (硬直したデバイス)。
1️⃣ ドッキング前の段階
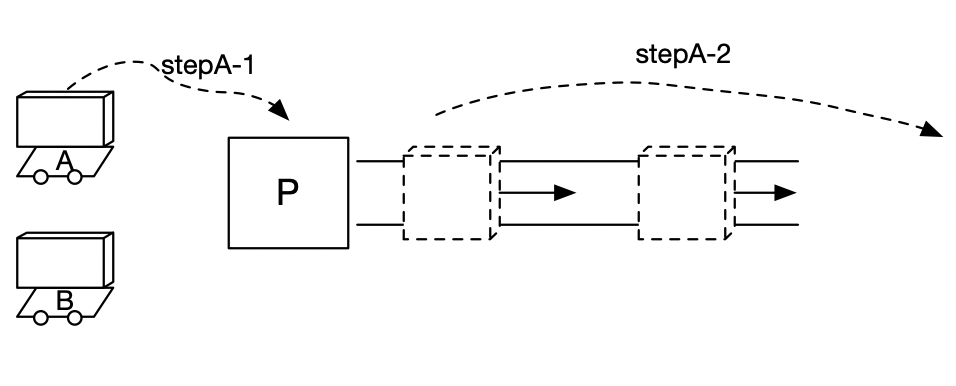
移送が始まる前に、複数のAGVが同じ地点へパレットを届ける必要があるかもしれません。それぞれ異なる距離を移動し、予測不可能な交通状況に直面するため、 動的スケジューリング が求められ、どのAGVが先にドッキングするかを決定します。
これは、 局所的な群集意思決定問題であり、速度と効率の両方をバランスさせることが重要です。アイドル状態のAGVも、経路の妨げや移動時間の無駄を避けるために戦略的に再配置する必要があります。
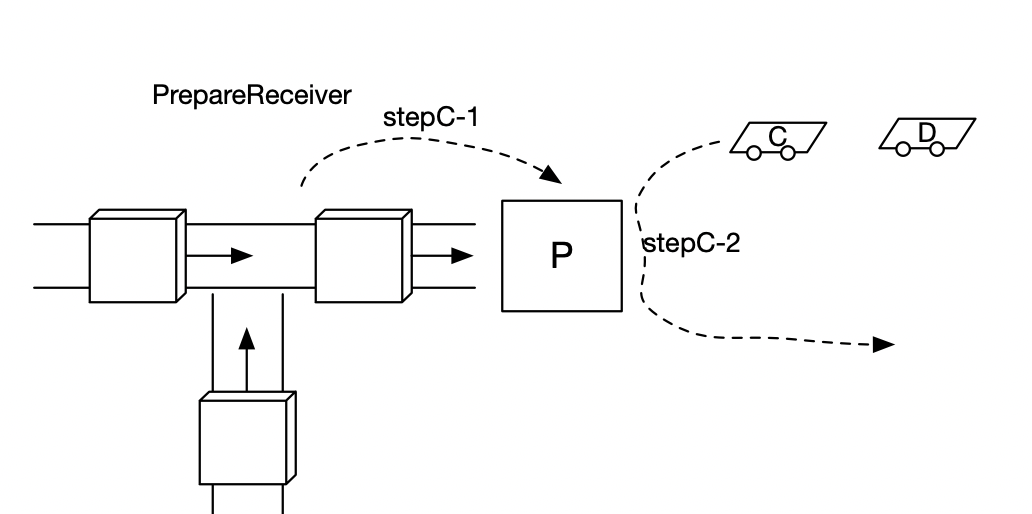
状況が逆転した場合——つまり、 コンベヤーラインがAGVへ供給する場合——AGVは、 ドッキングエリア近くで待機すべきです、コンベヤーがパレットの準備ができていることを示した瞬間にすぐに対応できるよう備えておくのです。これにより遅延が減少し、スループットが高く保たれます。
🔄 ドッキングプロセス:動きながらの同期
ドッキング中は、両システムが 正確な物理的インターフェース 同時に到達しなければなりません。通常、二つのアプローチがあります:
-
同期運動によるドッキング: 両方の装置が一緒に動く方式で、ローリングコンベアのような動きです。この場合、受け側は少し早めに動き始めることで、詰まりを防ぐ必要があります。
-
順次ドッキング: 一方の装置が荷物を降ろし、その後もう一方の装置がそれを拾い上げる方式です。このためには、正確なタイミングと安定した位置決めが必要です。
安全は常に最優先です。位置ずれや連携不良が生じると、 機械的損傷や作業フローの中断を引き起こす可能性があります。.
✅ ドッキング後の処理:効率化への道を開く
ドッキングが完了したら、AGVは 速やかに出発する必要があります。 次のユニットのためにスペースを空けるためです。ドッキングポイントでの遅延は交通渋滞を招き、システム全体の効率を低下させます。
したがって、 ルート計画と出発ロジックが 全体のドッキング設計において不可欠です。AGVは、作業負荷やスケジュールの優先度に応じて、近くの待機位置へ移動するようプログラムしたり、直ちに次のタスクを開始するよう設定したりできます。
⚡ 効率最適化戦略
大規模な運用下でも高いスループットを維持するためには、スマート倉庫は単なる機械的な連携にとどまらず、 インテリジェントなスケジューリングと予測制御が必要です。. 主な戦略としては、
1. 高優先度の配車
AGVがコンベアやリフトと連携する際には、高優先度のAGVにパレットを迅速に搬出させるよう割り当てることで、ボトルネックを防ぎ、物資の流れを継続的に確保します。
2. 積極的な電力配分
混雑するドッキングポイント付近では、事前にAGVを準備して移動距離を最小限に抑えます。予測アルゴリズムによって最適なタイミングで事前配置を行うことで、早すぎても無駄になり、遅すぎても遅れを生じさせないようにします。
3. 納品後の適時出発
パレットの納品が完了したら、AGVは 待機ゾーンに戻るか、 すぐに新たなタスクを引き受けるべきです。これにより、車両群が常に動的であり、重要な交差点でのアイドル状態によるブロックを回避できます。
4. ドッキングポイントの選択
複数のドッキングオプションがある場合(例えば、階間輸送用の複数のリフトなど)、 適応型ドッキング選択アルゴリズムが 現在の作業負荷が最も低いステーションを優先します。
🗺️ 配置とマップの最適化
実効値 倉庫マップの設計は 円滑なドッキング作業にとって不可欠です。適切に計画された配置は、連携した動きをサポートし、混雑を避け、システム全体の安定性を向上させます。
主要なレイアウト設計要素には、
• キュー・ゾーン
ドッキング前のキュー・ゾーンは、AGVが整然と列を作れるようにし、混雑するドッキングステーションへの秩序あるアクセスを保ち、ピーク時における混乱を防ぎます。
• 分離された待機エリア
一つの入口と出口しかないステーションでは、 バッファとなる待機エリアが 交通渋滞を防ぎ、流れを継続させるために非常に重要です。
• 待機ゾーン
ドッキングエリア近くの休憩スポットは、AGVが待機状態を保てるようにし、反応時間を最小限に抑えて、新たなタスクが発令された際に車両群の即応性を向上させます。
これらのレイアウト原則は、 Akurosのインテリジェント倉庫計画システムの一部であり、そこで、 ユニバーサルなドッキングロジックが と密接に連携し、 マップ最適化が 最大限の効率と柔軟性を実現するために働いています。
🤖 柔軟なドッキングが未来にとってなぜ重要なのか
自動化技術が進歩するにつれ、 固定的で単一目的の接続は、 よりモジュラーで柔軟なシステムへと取って代わられつつあります。 幅広い種類の商品やワークフローに対応できるシステムです。柔軟なドッキングにより、 複数の自動化システム間でのシームレスな連携が可能になります。
-
レイアウトや製品の変更への迅速な適応が可能になります。
-
システムのダウンタイムが短縮されます。
-
安全性と運用信頼性が向上します。
-
Akurosの自動倉庫ソリューションにより、
ET(有効厚さ)の増加がありません 企業は倉庫の知能レベルを新たな段階へと引き上げることができます—すべてのAGV、リフト、コンベアが統一されたロジックシステムを通じて通信し、真に柔軟で効率的かつ安全な自動化環境を実現できます。 💬 結論.
無人自動倉庫を構築することは、
無人自動倉庫を構築することです。 unmanned automated warehouse は単なるロボットの話ではなく、それらのロボットが知的に協働できるようにすることにあります。 柔軟なドッキングロジック、予測型スケジューリング、およびレイアウト最適化により、物流業務はリアルタイムでの効率性、安全性、そしてスケーラビリティを実現できます。
で アクロスにおいて、私たちは倉庫自動化の限界を引き続き押し広げ、スマートロジスティクスの時代に向け、設備同士の接続・通信・協調のあり方を再定義するソリューションを提供し続けています。